Roboreactor
An end-to-end platform powered by agentic AI to turn ideas into real, operating robots — from CAD generation to real-time deployment in the physical world.
Web-Based Real-time

How it Works: The Robotic Lifecycle
AI-Driven Blueprinting
Describe the robot you want to build in natural language. Our Agentic Manufacturing Assistant AI interprets your mission, operating environment, and behavior goals, then selects the optimal hardware stack from your description. Based on that selected hardware, the system automatically generates matched firmware and middleware for your robot architecture.
Topological Refining
Visualize and fine-tune your robotic logic within the node-based code generator. Dynamically adjust hardware nodes and control loops to match your design before triggering final synthesis.
Export & Code Generation
Once your hardware node graph is reviewed in Roboreactor, hit Export to trigger full code synthesis. The system reads every node connection — motor drivers, sensors, cameras, communication buses, MCU pin mappings — and generates production-ready code, including robot firmware and middleware matched to the hardware selected by the Agentic Manufacturing Assistant AI. No manual wiring, no protocol configuration, no boilerplate to write.
Deployment & Interaction
Deploy production-grade code to your hardware with one click. Maintain full lifecycle control through real-time 3D telemetry, interacting with your robot as designed via our global visualizer.
Core Intelligence Technologies
Autonomous VLA
Vision-Language-Action agents that interpret scenes and act in real-time with Fusion sensors.
Hardware Synthesis
Deterministic code generation for STM32, ESP32, Jetson, and RPi or Generate computer architectures.
Distributed Backbone
High-performance command-queue architecture for multi-robot swarms.
Real-time Visualizer
3D Point-Cloud and Digital Twin synchronization for global remote control.
Generate code
Describe your robot in plain language and let the Collective Task AI automatically build the full hardware node graph. The system intelligently selects and classifies every component across Motion, Navigation, Sensors, Vision, Audio, Communication, and MCU systems — then maps each hardware interface (PWM, I2C, UART, SPI, CAN, ADC, DAC, GPIO) to the correct microcontroller pins. The resulting drawflow node graph is displayed live in Roboreactor, showing every hardware connection and communication protocol. From there, production-ready code is generated for your single board computer instantly — no manual wiring diagrams, no low-level protocol knowledge required.
Create your project by Manufacturing assistant AI
Utilize the Manufacturing Assistant AI to design robots and automation systems effortlessly. Simply talk to our AI, and you can create an entire project with ease, including the required hardware, code, and components. Our system generates URDF models from Onshape software, which can then be seamlessly integrated with navigation and motion control systems.
Motion control and visualizing
With our motion control you can remotely connect with your robot utilizing our rapid IoT system, allowing you to operate your robot's real-time from anywhere. It enables you to run the robot in development mode with no gaps in between.
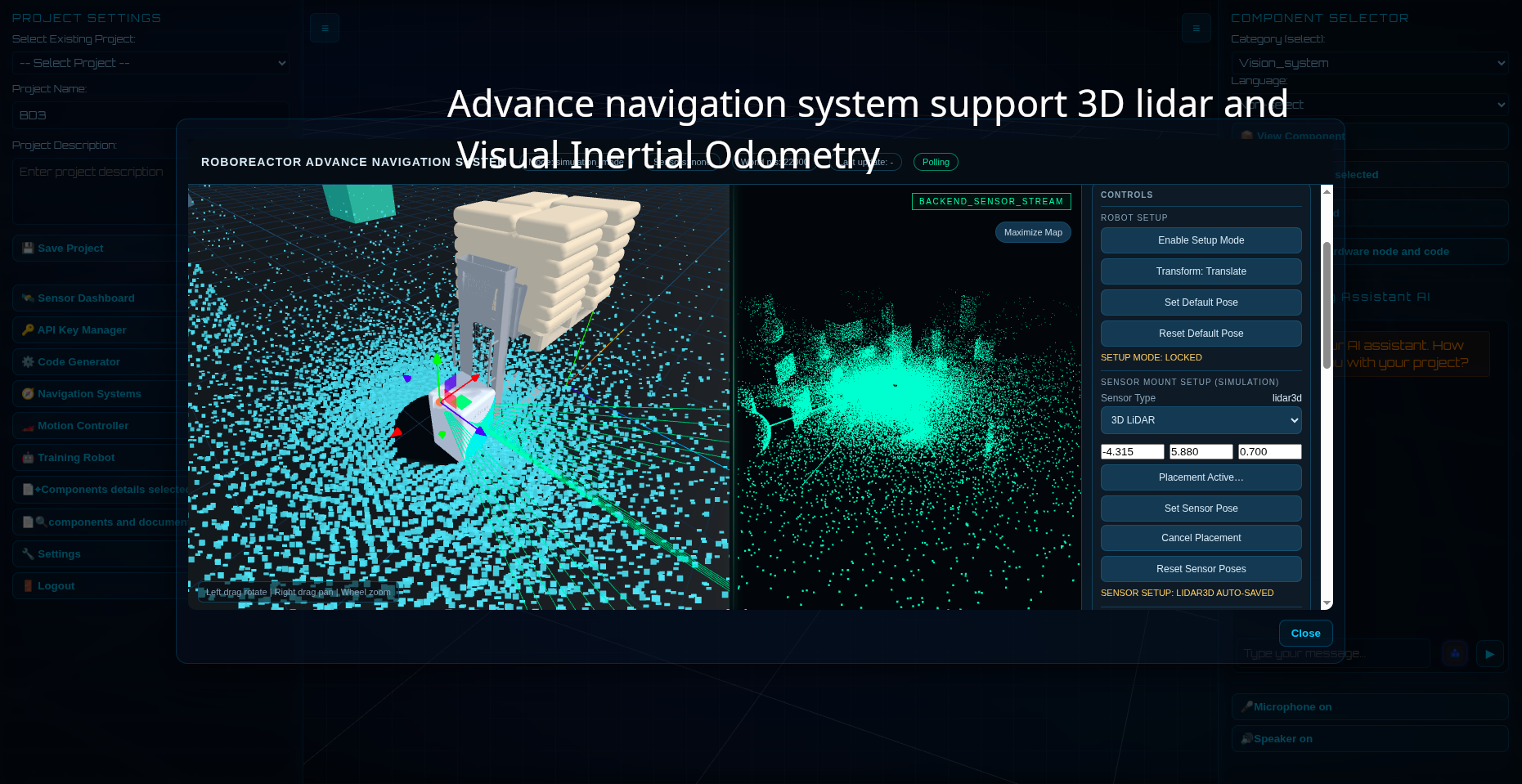
Navigation system and visualizing
Real-time point cloud mapping, created by your robot's sensors including Lidar, Radar, Sonar, WiFi localization, Beacons, and cameras, is available for indoor and outdoor navigation systems through our navigation visualizer. Track your robot's movements and coordinate multiple robots to create a swarm.
Key features
Explorer
|
Builder
|
Innovator
|
Industrial
|
|
|---|---|---|---|---|
| Daily cloud runtime | 2 hrs/day | unlimited | unlimited | unlimited |
| Support language | python | python | python | python,rust |
| Components DB | community | advanced | industrial | enterprise |
| SBC (Pi/Jetson/SBC) | local edit | basic deploy | advanced deploy | fleet deploy |
| LLMs model | Llama3.2 | Llama3.2 | Gemini-2.5 | Gemini,Kimi |
| Digital Twin navigation | basic | |||
| Motion visualizer | basic | |||
| Auto node & code gen | basic | |||
| Auto CAD & assembly | basic | |||
| Sim to real | basic | |||
Start create your robotics product and automation system now!