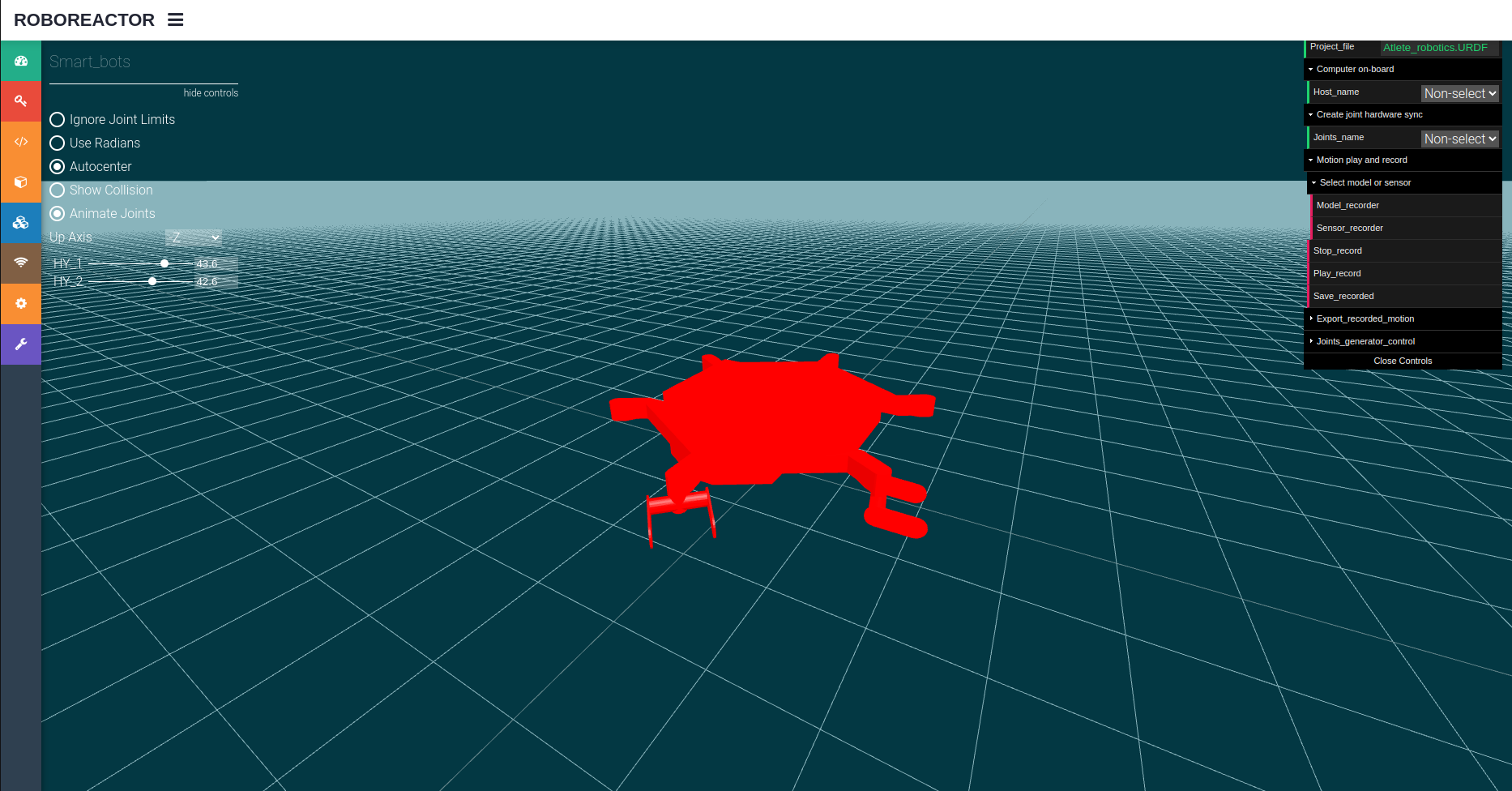
Step 1. Go to the profile dashboard and click on the menu "Motion controller".Make sure that you have created the URDF model from URDF wizard or upload your URDF file from the URDF wizard in profile page.
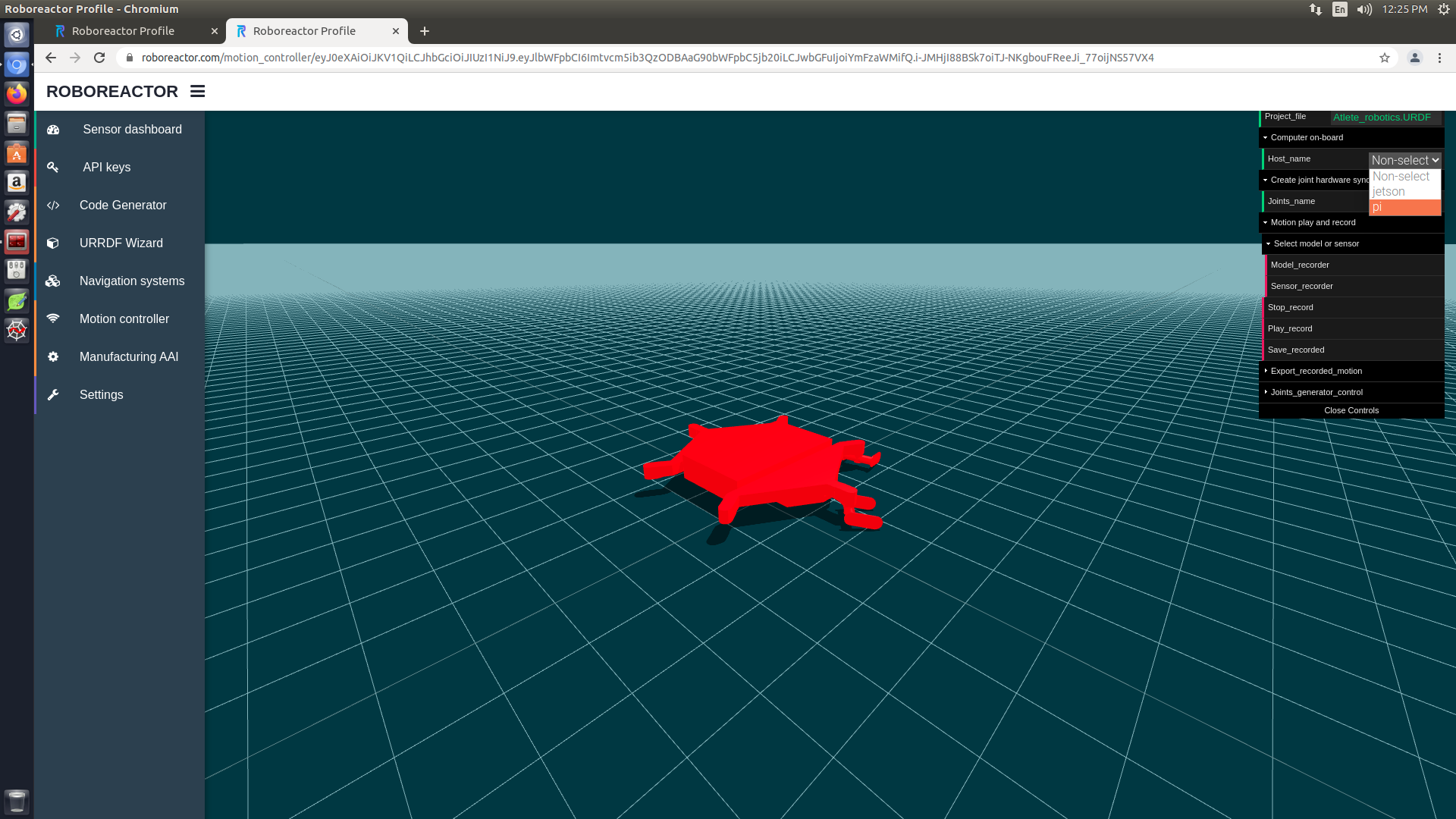
Step 2. Select your robot host to generate the motion controller code into the single board computer that you are using robot.
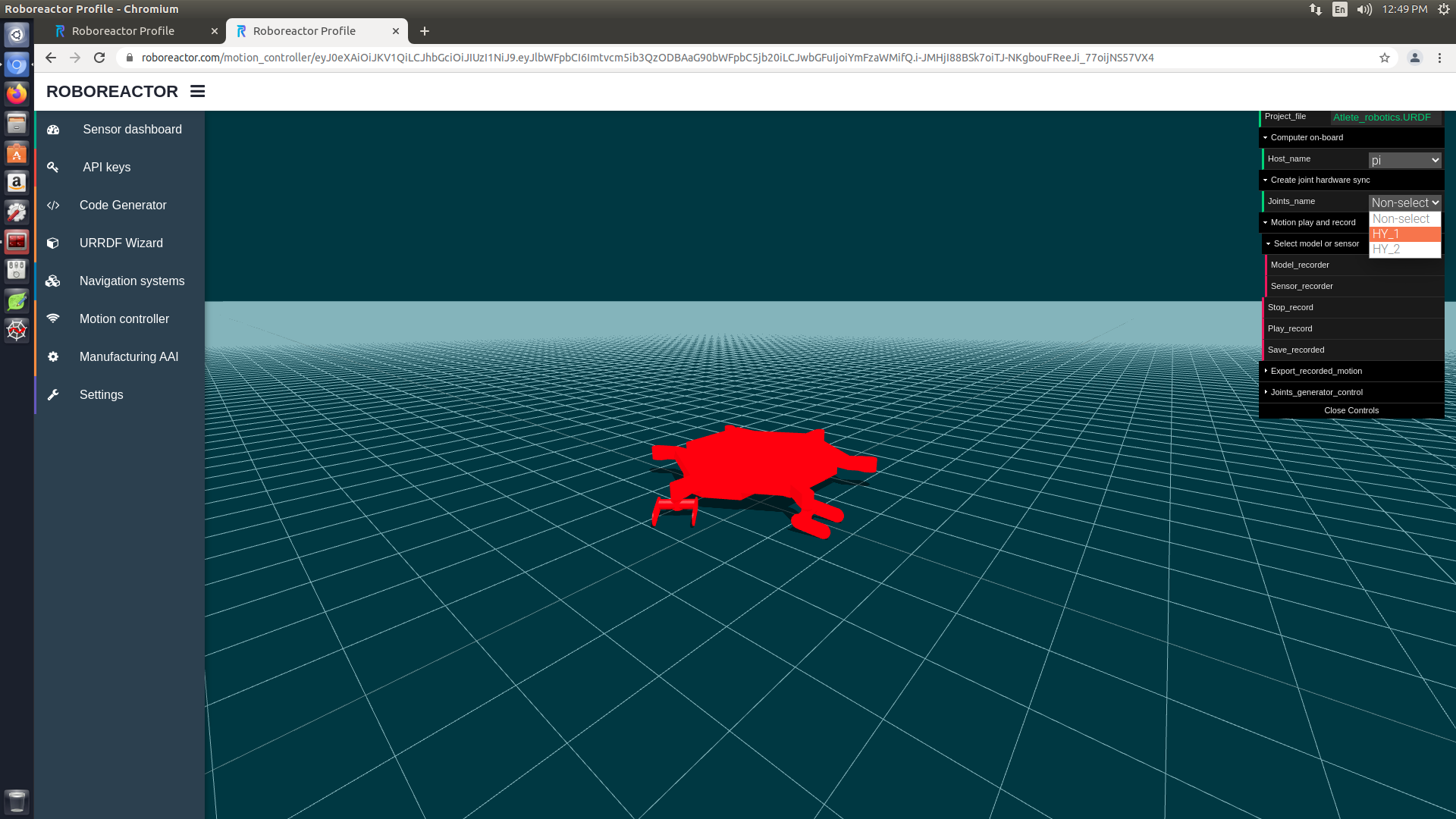
Step 3. Select you joints of your robot from select box.This will be automatically add into the list based on the URDF wizard you just generated from previous step you can check that out.
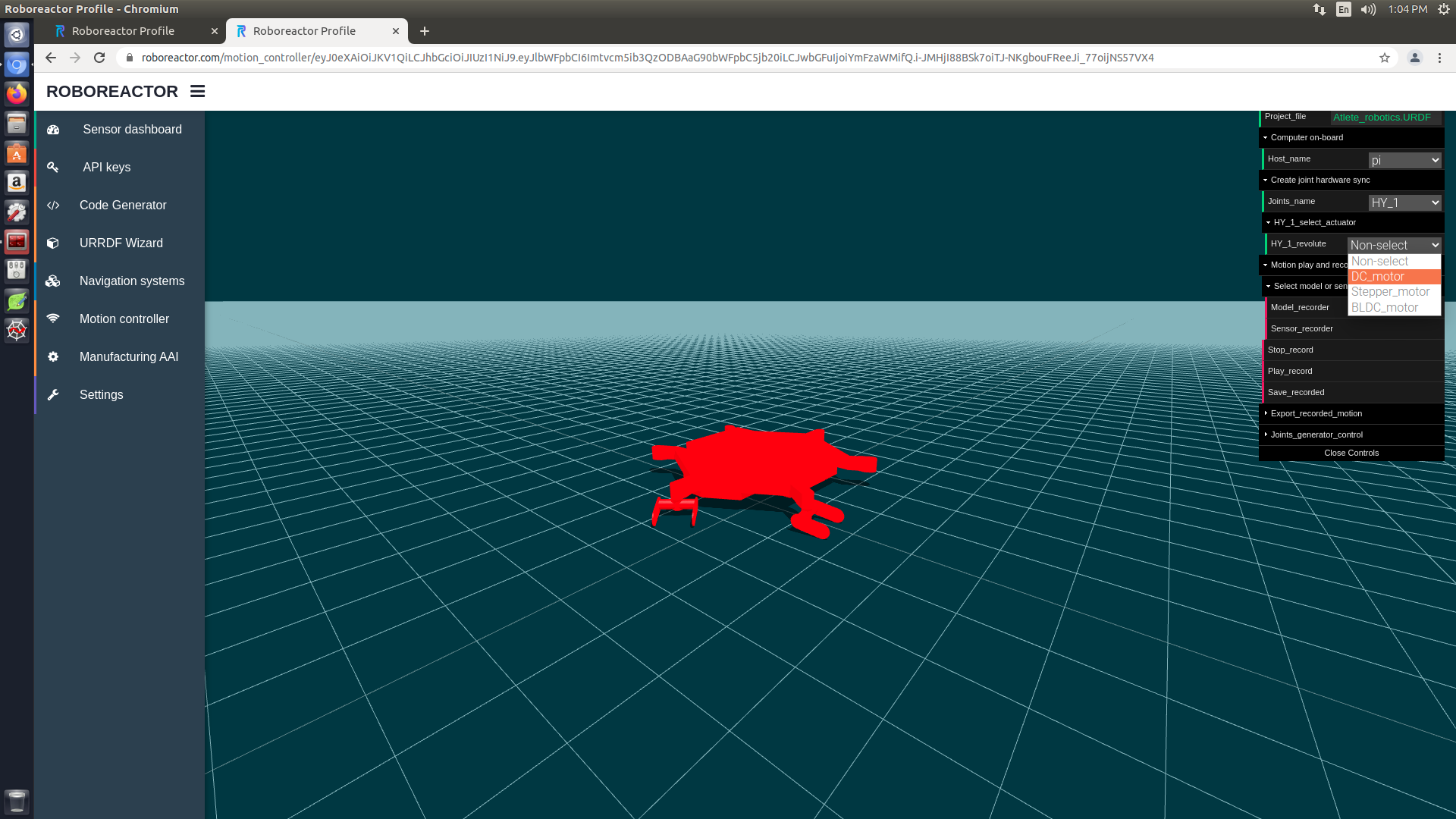
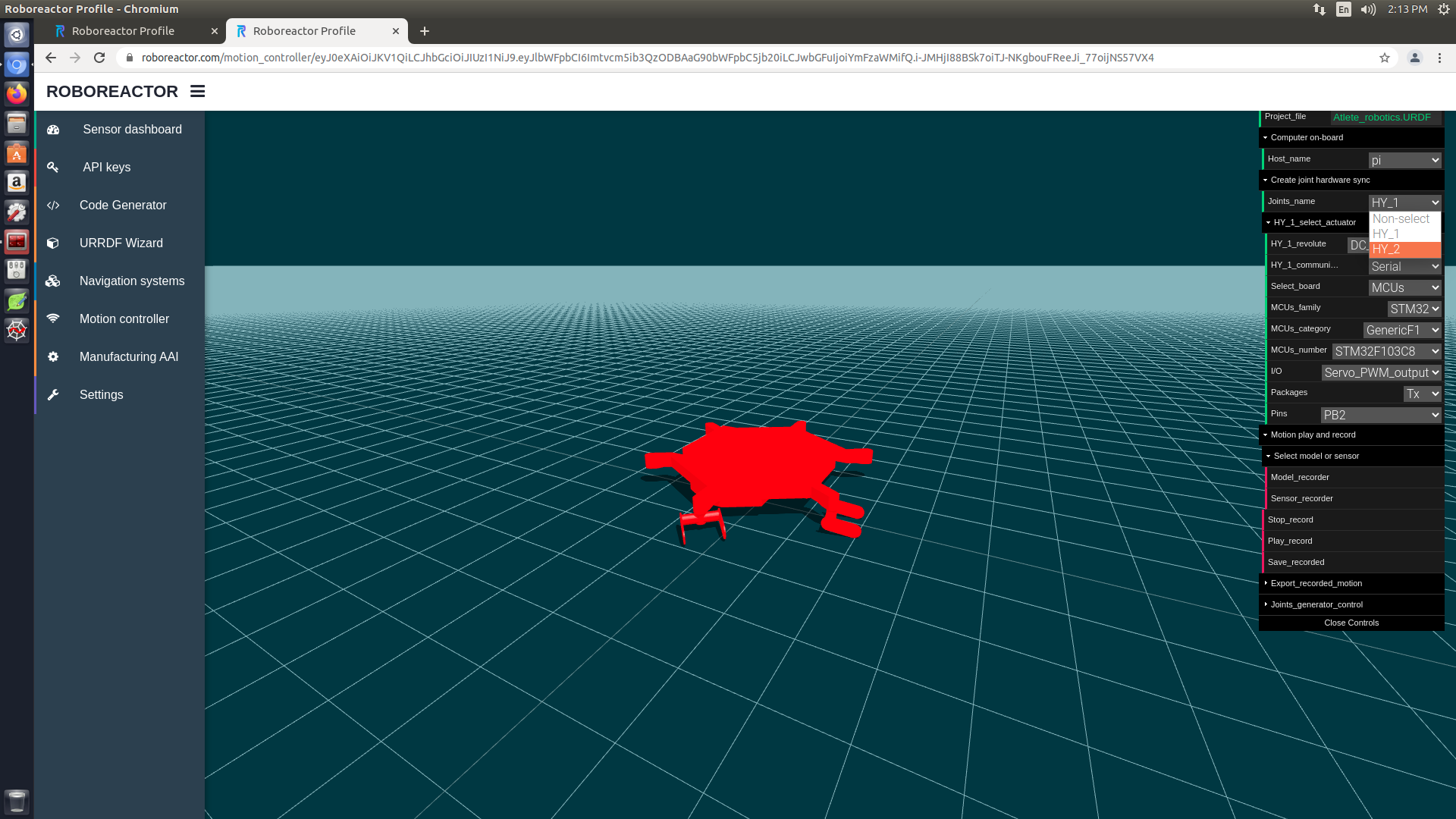
Step 4. Select your motor type on the joints of your actuator you are using.
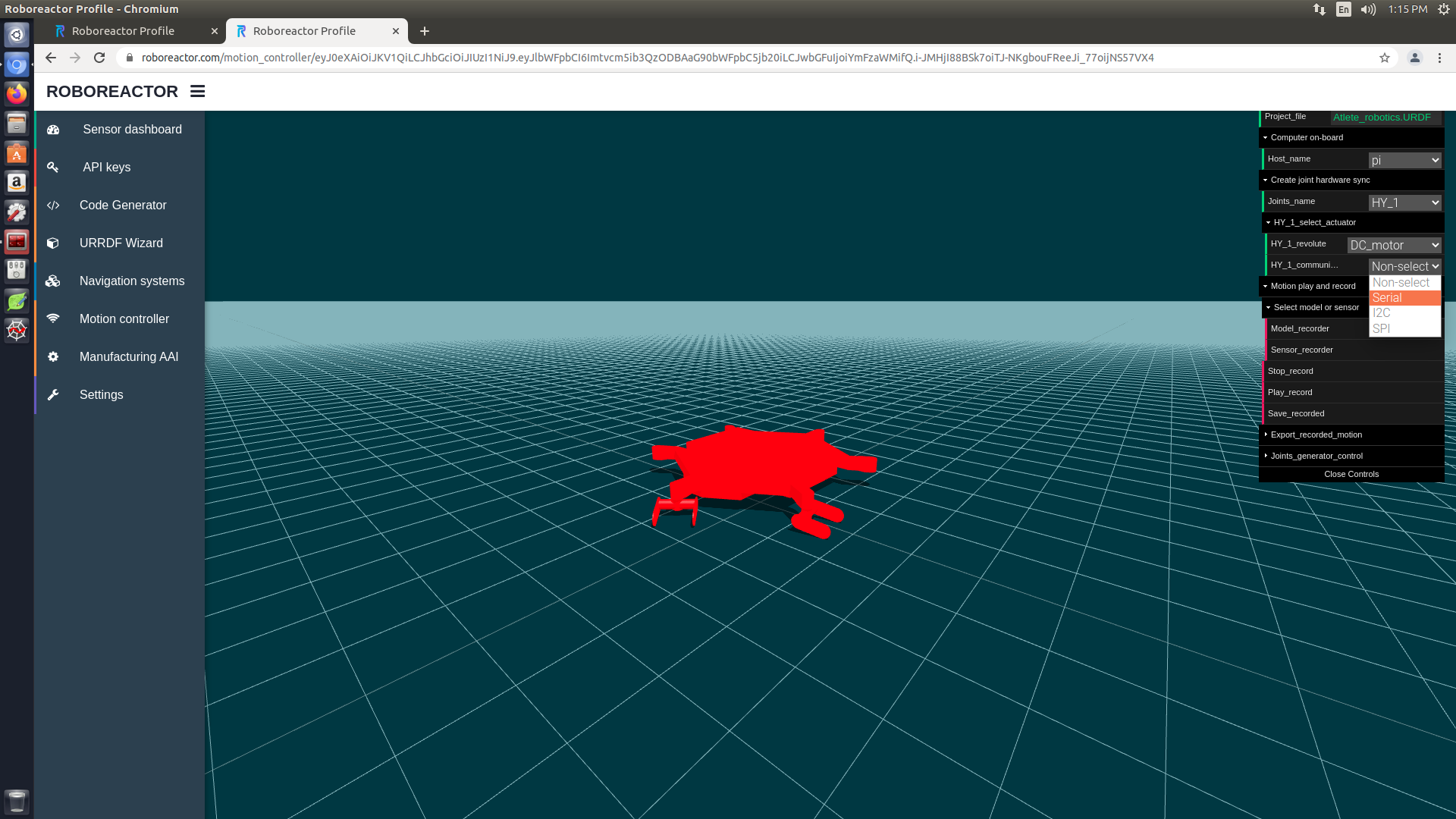
Step 5. Select your motor communication type serial for microcontroller I2C for the on-board GPIO of singleboard computer or I2C expansion board and for SPI not support for now we will update this soon.*Noted in this example we using the microcontroller as example for control actuators for joint movement and control by serial communication from Single Board Computer.
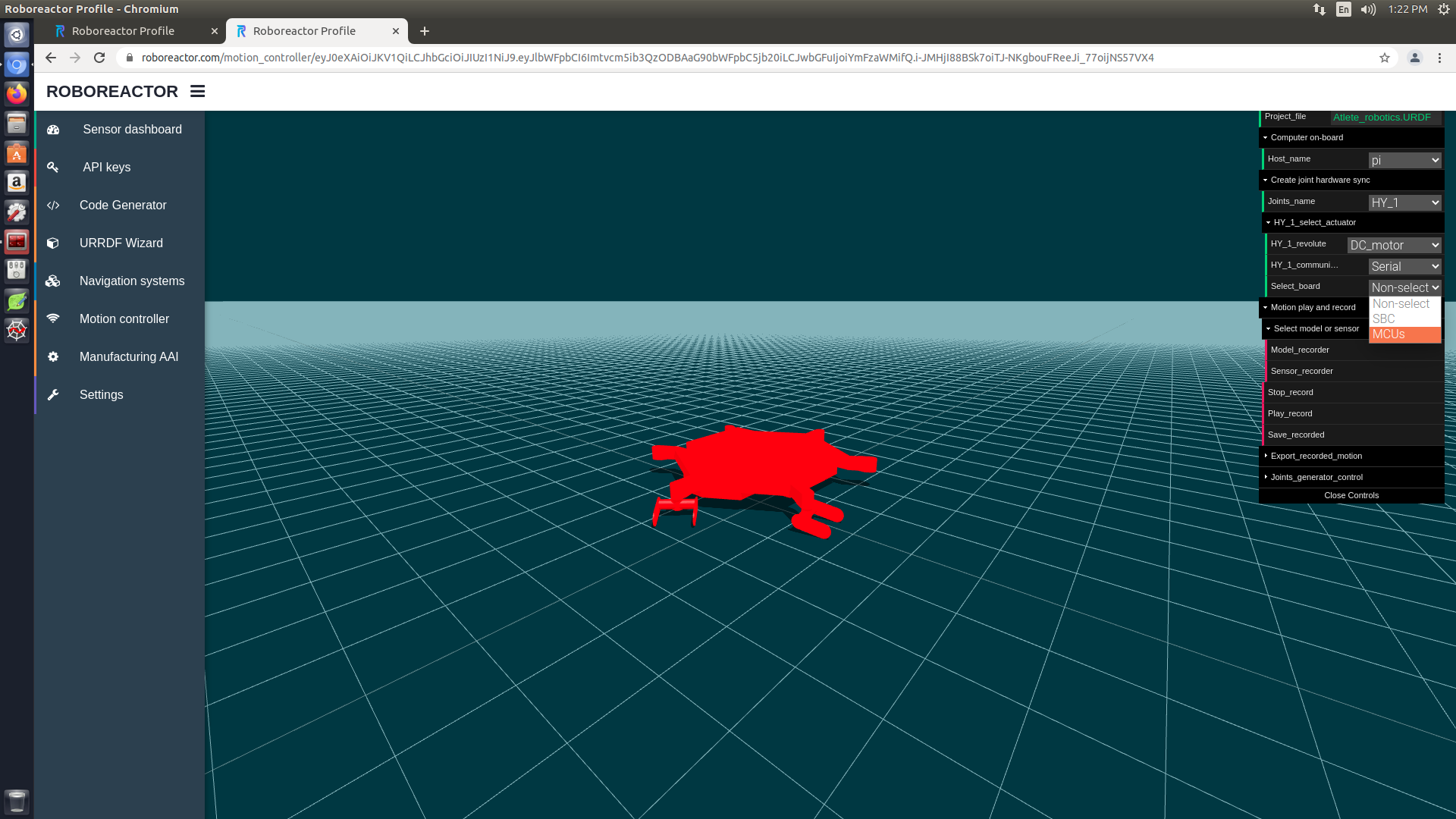
Step 6. Select your single board computer or microcontroller that you are using base on commincation system you are selected previously to let the system know which of protocol it working on.
Step 7. Select you board family or codenames of your board weather it's Single Board Computer or (SBC) or Microcontroller (MCU).
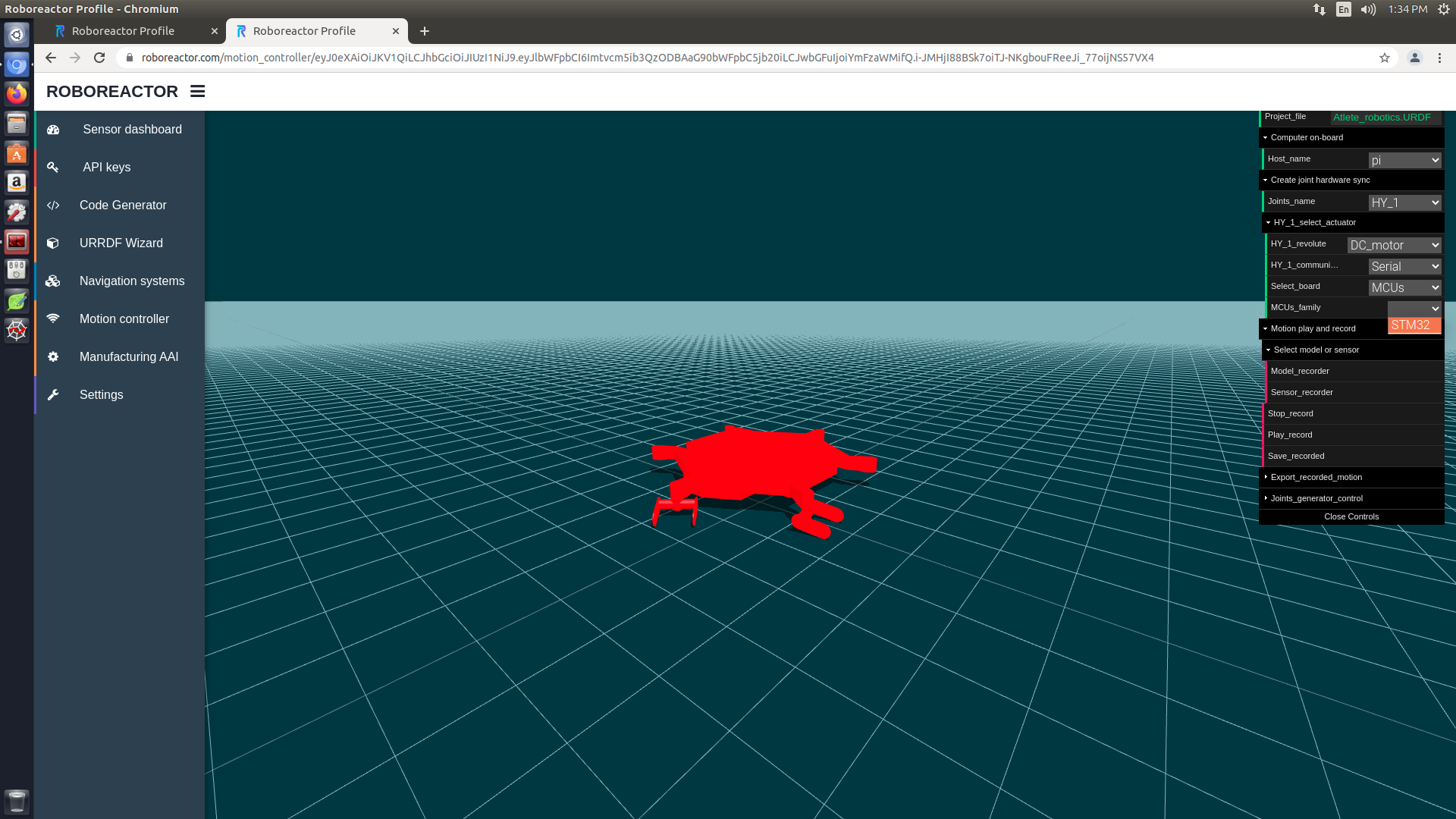
Step 8. Select your MCU category in this case we are going to use STM32.
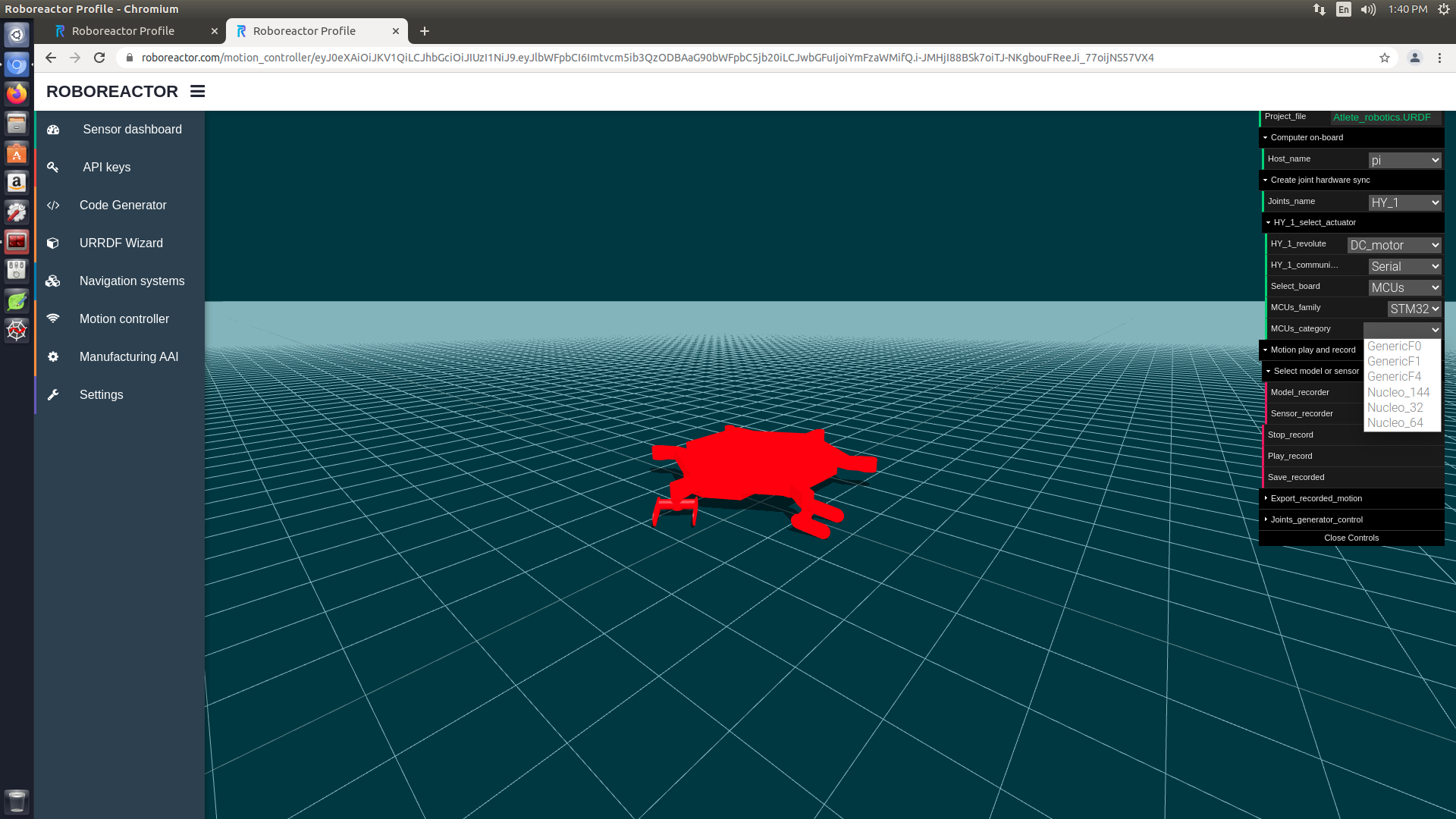
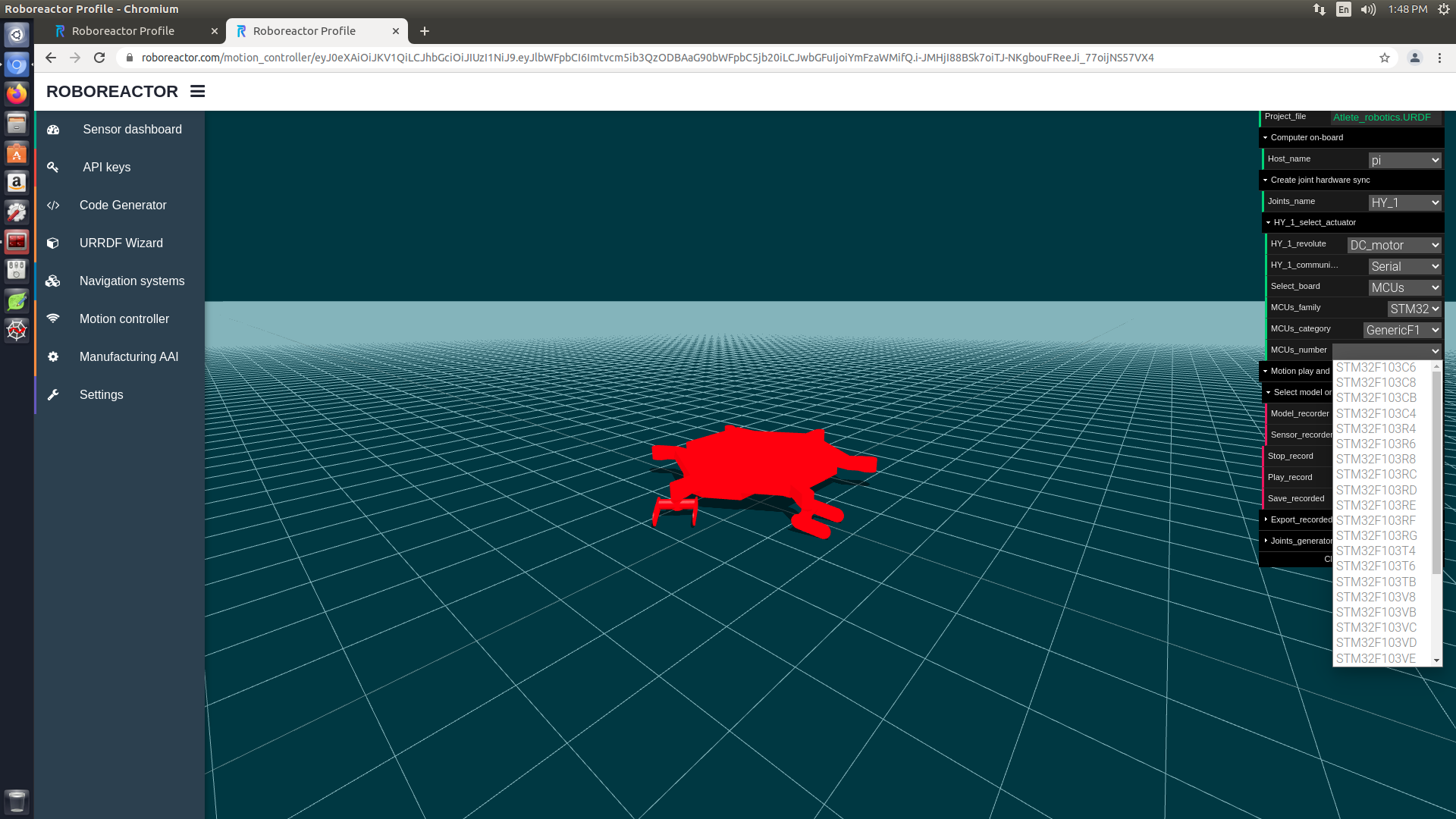
Step 9. Select your MCU number in this case we are going to use the STM32F103T8T6 microcontroller since it's cheap and everyone can be accessible.
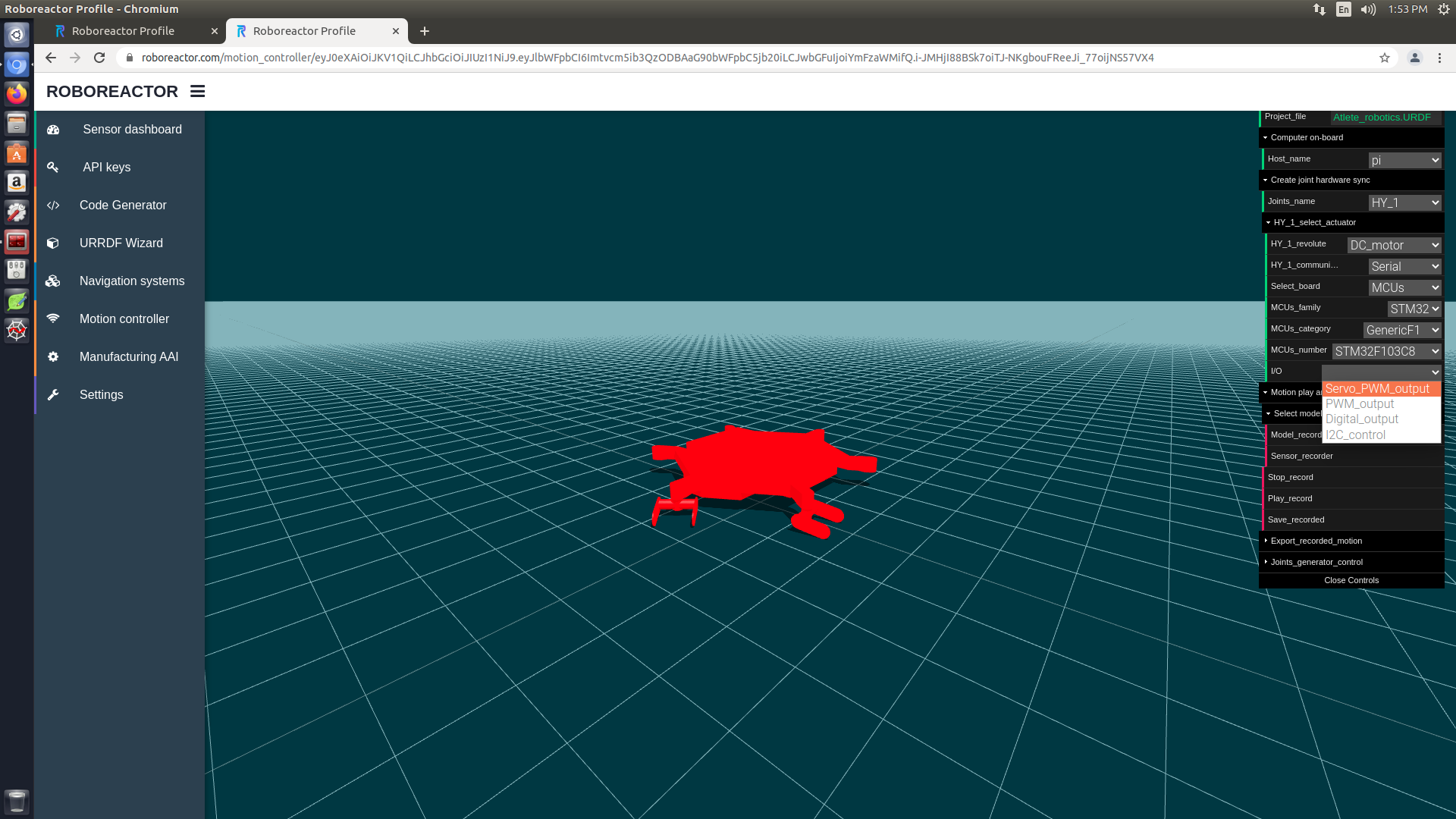
Step 10. Select your MCU signal for controlling the actuator type in this case we are going to control using the "Servo_PWM_output".
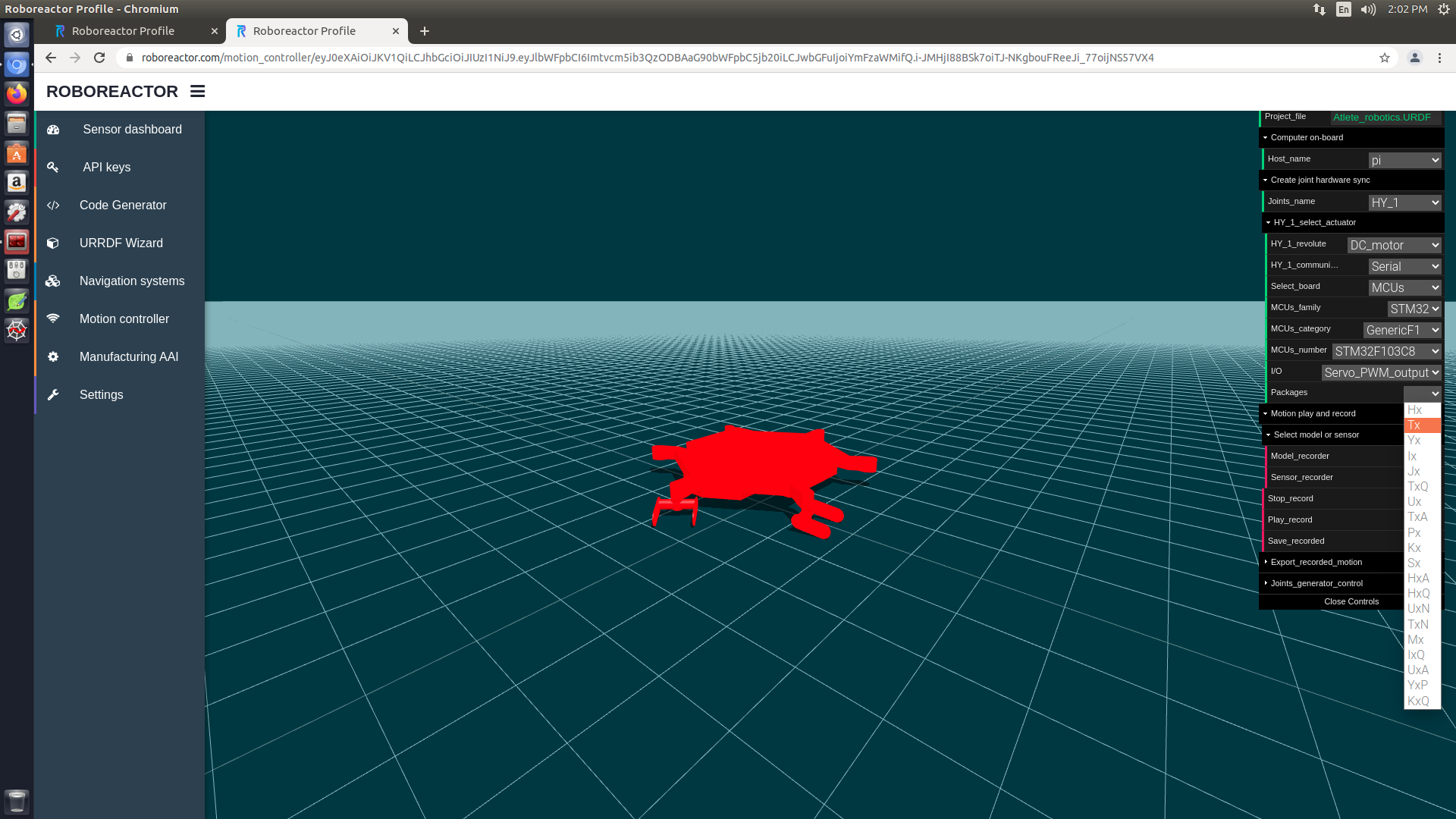
Step 11. Select the package of the microcontroller you are using.
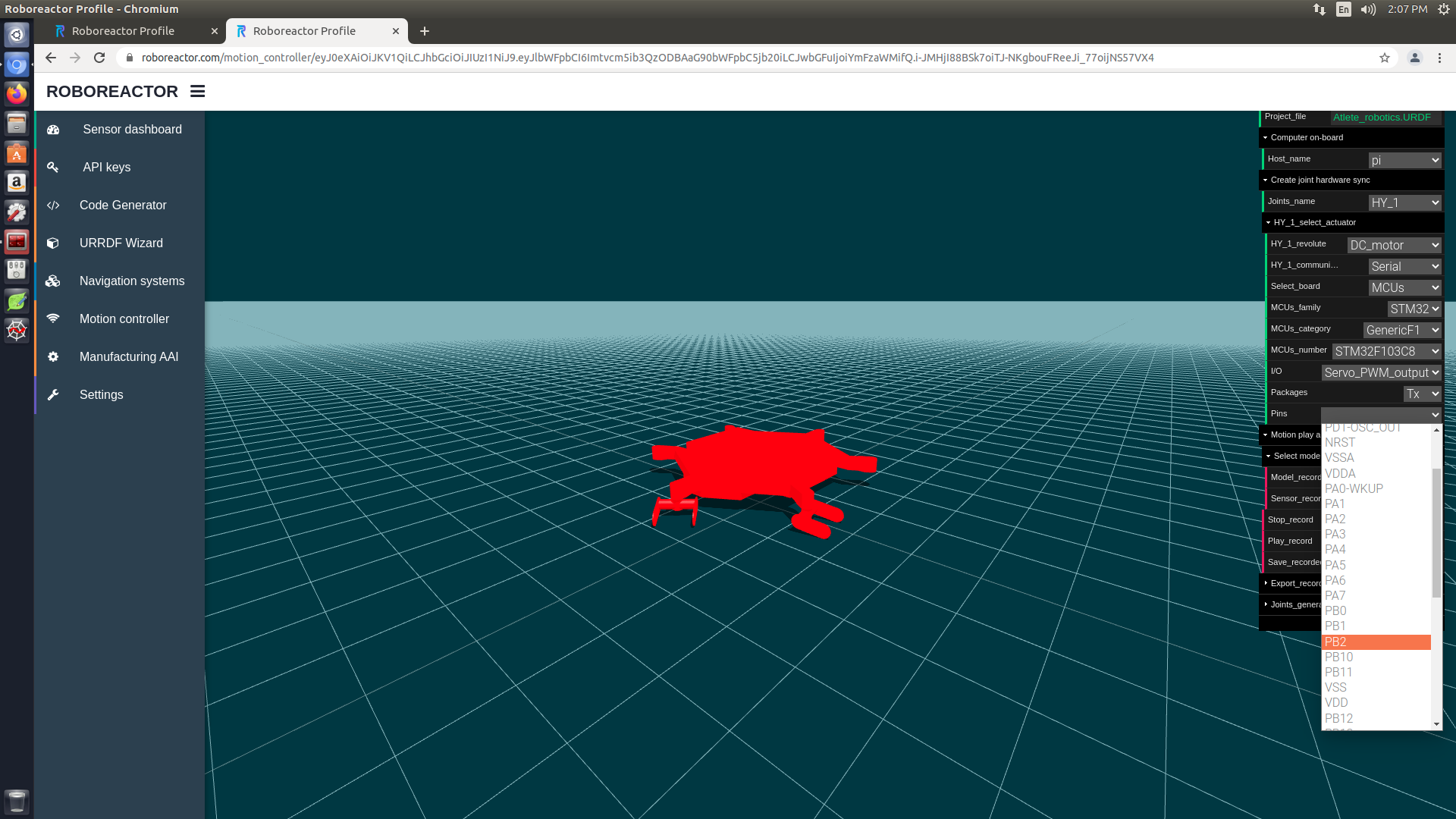
Step 12. Select pin number of the microcontroller.
Step 13. And repete the same process if your next robotic's joint or actuator you are using still the same specification of microcontroller.
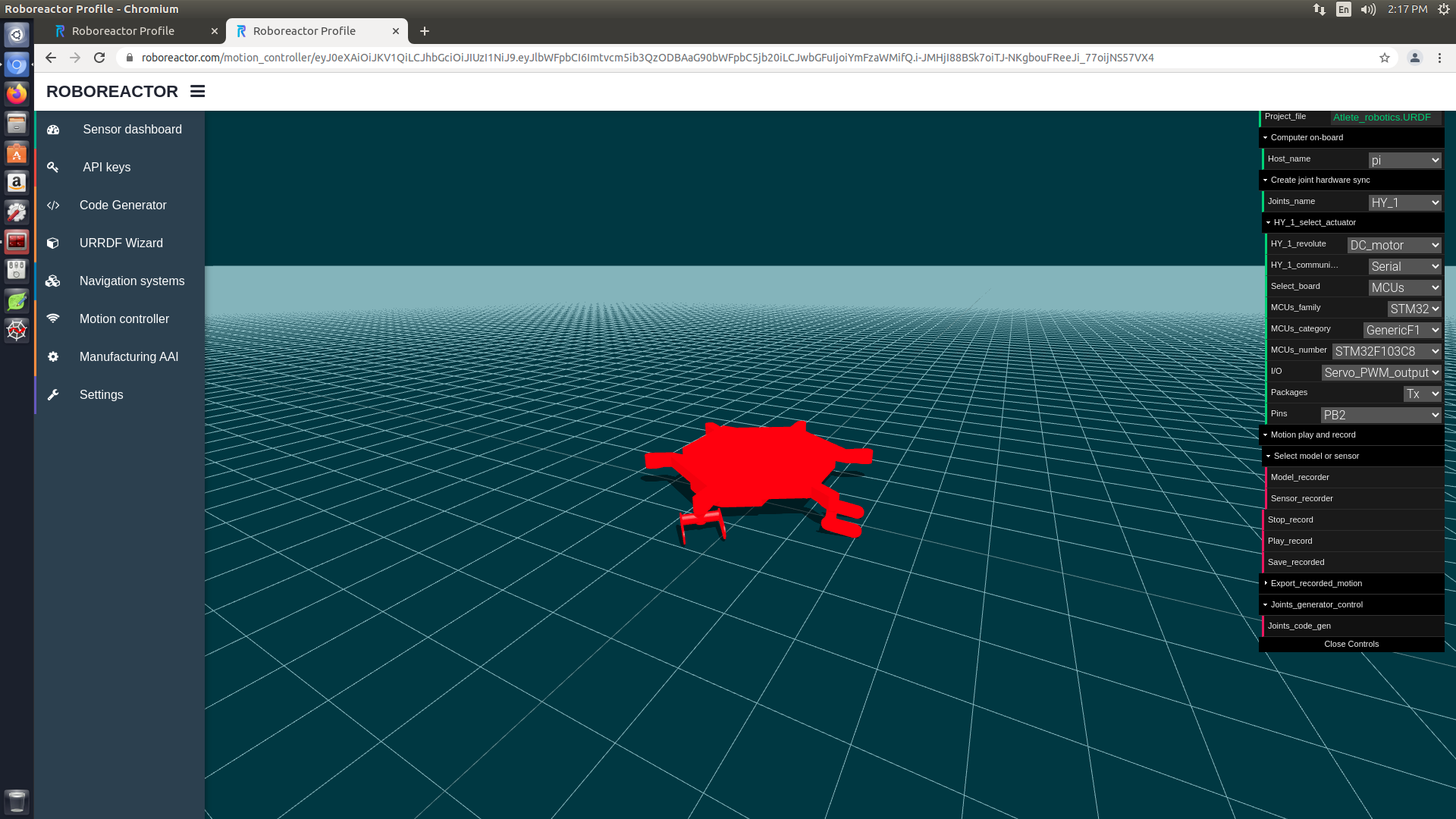
Step 14. If all are done you can click on Joint_generator_control and click on the button "Joints_code_gen".Now the code to control your joint will be generated inside your Single Board Computer and congratulation now you can control your robot using the 3D model you created on motion control page.